Trong kỷ nguyên công nghiệp 4.0, tự động hóa đã và đang trở thành “trái tim” của mọi dây chuyền sản xuất hiện đại. Ở đó, động cơ bước (stepper motor) giữ vai trò quan trọng trong việc điều khiển chuyển động chính xác, lặp lại và ổn định – đặc biệt trong các ứng dụng như robot, máy in 3D, CNC hay dây chuyền lắp ráp.
Vậy động cơ bước là gì, vì sao nó lại phổ biến đến vậy, và làm thế nào để lựa chọn, điều khiển nó đúng kỹ thuật? Hãy cùng H&T Automation tìm hiểu chi tiết trong bài viết dưới đây.
Động cơ bước là gì?
Động cơ bước (Stepper Motor) là loại động cơ điện chuyển đổi các tín hiệu xung điện rời rạc thành chuyển động quay theo từng bước góc xác định. Mỗi xung điện tương ứng với một góc quay nhỏ, thường từ 1.8°, 0.9° hoặc nhỏ hơn tùy vào cấu hình của động cơ.
Điểm khác biệt lớn nhất của động cơ bước so với động cơ DC thông thường là khả năng điều khiển vị trí và tốc độ chính xác mà không cần cảm biến phản hồi (feedback). Chính vì vậy, nó được sử dụng rộng rãi trong các hệ thống yêu cầu độ chính xác cao nhưng không cần chi phí lớn như Servo motor.

Phân loại động cơ bước
Phân loại dựa vào số pha của động cơ
Dựa vào cấu hình cuộn dây, động cơ bước có thể chia thành các loại phổ biến sau:
- Động cơ bước 2 pha: Là loại phổ biến nhất, có hai cuộn dây lệch nhau 90°. Dễ điều khiển, giá thành thấp, phù hợp hầu hết ứng dụng cơ bản.
- Động cơ bước 3 pha: Cho chuyển động mượt và moment xoắn lớn hơn, thường dùng trong máy móc công nghiệp.
- Động cơ bước 5 pha: Góc bước nhỏ (0.72°), độ chính xác cao, độ rung thấp, giá cao hơn.
Phân loại động cơ bước dựa vào rotor
- Động cơ bước nam châm vĩnh cửu (PM – Permanent Magnet): Rotor gắn nam châm vĩnh cửu, có moment lớn nhưng độ chính xác trung bình.
- Động cơ bước biến từ (VR – Variable Reluctance): Rotor không có nam châm, hoạt động dựa trên từ trường biến thiên, độ chính xác cao nhưng moment yếu.
- Động cơ bước lai (Hybrid Stepper): Kết hợp ưu điểm của hai loại trên, vừa có moment xoắn mạnh, vừa hoạt động êm và chính xác – là loại phổ biến nhất hiện nay.
Phân loại tùy thuộc vào cực của động cơ
Tùy vào số cực từ của rotor và stator, góc bước của động cơ thay đổi. Số cực càng nhiều thì góc bước càng nhỏ, giúp điều khiển chính xác hơn.
Cấu tạo của động cơ bước
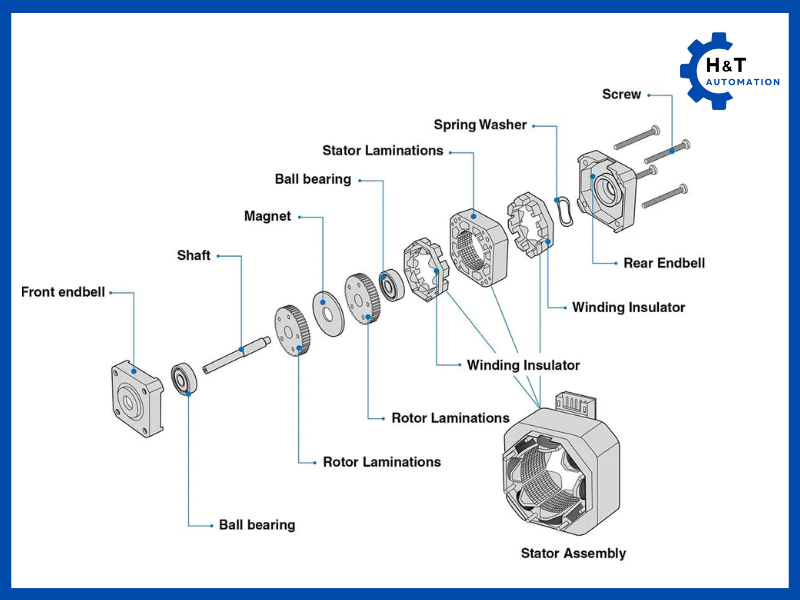
Cấu tạo cơ bản của một động cơ bước bao gồm ba phần chính:
- Stator: Gồm các cuộn dây được bố trí xung quanh lõi sắt từ, có nhiệm vụ tạo ra từ trường khi được cấp điện.
- Rotor: Phần quay của động cơ, có thể là lõi thép răng hoặc nam châm vĩnh cửu.
- Bộ điều khiển (Driver): Thiết bị nhận tín hiệu xung từ vi điều khiển (PLC, Arduino, v.v.) và cấp điện cho các cuộn dây theo thứ tự, giúp rotor quay đúng góc.
Ngoài ra, hệ thống thường đi kèm với bộ vi điều khiển và nguồn DC để tạo ra chuỗi xung chính xác cho driver.
Thông số motor bước
Một số thông số quan trọng mà kỹ sư cần nắm rõ khi lựa chọn động cơ bước gồm:
- Góc bước (Step Angle): Góc quay ứng với mỗi xung điều khiển, quyết định độ phân giải.
- Moment giữ (Holding Torque): Moment cực đại giữ rotor đứng yên khi có điện.
- Moment kéo (Pull-out Torque): Moment cực đại khi động cơ đang quay mà không bị mất bước.
- Điện áp và dòng định mức: Quyết định công suất và tốc độ hoạt động.
- Số pha: 2, 3 hoặc 5 pha – ảnh hưởng đến độ mịn và độ ổn định khi quay.
Bảng ví dụ:
| Thông số | Giá trị điển hình | Ý nghĩa |
| Góc bước | 1.8° | Độ phân giải trung bình |
| Điện áp định mức | 12V – 48V | Tùy ứng dụng |
| Moment giữ | 0.3 – 8 N.m | Xác định khả năng tải |
| Dòng định mức | 0.5 – 5A | Ảnh hưởng đến công suất |
Nguyên lý hoạt động của động cơ bước
Nguyên lý hoạt động của động cơ bước dựa trên sự kích từ tuần tự các cuộn dây stator, tạo ra từ trường quay hút rotor di chuyển theo từng vị trí nhất định. Mỗi khi có một xung điện gửi đến driver, dòng điện đi qua một cuộn dây, sinh ra lực từ hút rotor quay một góc bước.

Khi xung điều khiển được cấp liên tục, rotor quay liên tục với tốc độ tỉ lệ với tần số xung.
Công thức tính tốc độ quay:
n = (f × 60) / (N × S)
Trong đó:
- n: tốc độ (vòng/phút)
- f: tần số xung (Hz)
- N: số bước mỗi vòng
- S: số pha
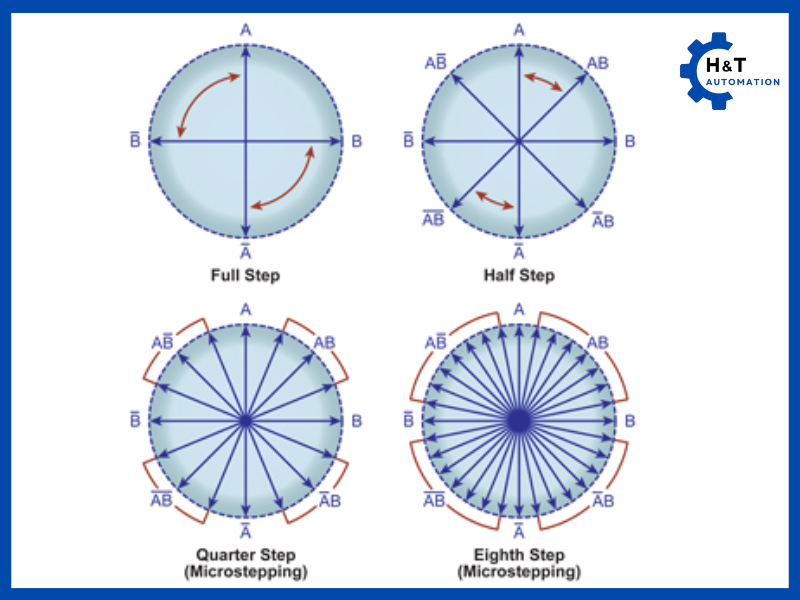
Chế độ vi bước (Microstepping)
Công nghệ microstepping giúp chia nhỏ mỗi bước thành nhiều phần nhỏ hơn (1/2, 1/4, 1/8,…), giúp động cơ quay mượt, giảm rung và chính xác cao hơn. Tuy nhiên, điều này cũng yêu cầu driver điều khiển phức tạp và nguồn ổn định.
Ứng dụng của động cơ bước
Động cơ bước được ứng dụng trong hầu hết các lĩnh vực tự động hóa, đặc biệt là:
- Máy in 3D, máy CNC mini, robot công nghiệp: Cần độ chính xác cao trong điều khiển vị trí.
- Thiết bị y tế: Bơm định lượng, máy chụp X-quang, bàn di chuyển mẫu.
- Điện tử và bán dẫn: Hệ thống pick & place, điều khiển tay máy, băng tải chính xác.
- Tự động hóa dân dụng: Cửa tự động, camera quan sát, hệ thống đóng mở thông minh.
Ưu – nhược điểm của động cơ bước
Ưu điểm
| Đặc điểm kỹ thuật | Phân tích chuyên môn |
| Điều khiển vị trí chính xác (±5%) mà không cần phản hồi | Động cơ bước hoạt động theo cơ chế open-loop, mỗi xung tương ứng một bước quay, cho phép định vị chính xác mà không cần encoder. |
| Cấu trúc đơn giản, dễ tích hợp | Không chổi than, ít bảo trì, chỉ cần driver và tín hiệu xung – chiều là có thể điều khiển. Phù hợp cho máy in 3D, CNC mini, robot gắp linh kiện. |
| Giữ vị trí ổn định khi dừng (Holding Torque) | Khi cấp điện ở trạng thái dừng, từ trường stator giữ rotor cố định, giúp chống trượt, an toàn cho trục Z hoặc bàn di chuyển chính xác. |
| Điều khiển tốc độ linh hoạt bằng tần số xung | Dễ lập trình với PLC, Arduino; hỗ trợ microstepping giúp giảm rung, tăng độ mịn. |
| Chi phí thấp – độ bền cao | Giá chỉ bằng 1/2–1/3 động cơ servo, tuổi thọ vận hành >10.000 giờ, phù hợp cho các dây chuyền sản xuất liên tục. |
Nhược điểm
| Hạn chế kỹ thuật | Giải thích ngắn gọn |
| Mất bước khi quá tải hoặc tăng tốc đột ngột | Không có phản hồi, nên khi moment tải vượt ngưỡng, rotor không kịp theo xung điều khiển. |
| Moment giảm nhanh ở tốc độ cao | Do cảm kháng cuộn dây tăng theo tần số, dòng điện không đạt giá trị cực đại, làm giảm moment. |
| Hiệu suất thấp (65–75%) và tỏa nhiệt lớn | Cuộn dây luôn có dòng dù không tải → sinh nhiệt, cần giải pháp tản nhiệt. |
| Rung và cộng hưởng ở tốc độ trung bình | Chuyển động rời rạc tạo dao động cơ học; có thể khắc phục bằng driver microstep hoặc giảm rung cơ khí. |
| Không phù hợp với ứng dụng tốc độ cao, moment thay đổi liên tục | Servo motor hiệu quả hơn trong các hệ thống yêu cầu phản hồi nhanh, điều khiển moment chính xác. |
So sánh động cơ bước và động cơ servo
| Tiêu chí | Động cơ bước | Động cơ servo |
| Cấu trúc | Đơn giản, không có encoder | Có encoder phản hồi |
| Độ chính xác | Cao, nhưng có thể sai lệch khi quá tải | Rất cao, có bù sai số |
| Moment | Giảm theo tốc độ | Giữ ổn định ở dải rộng |
| Ứng dụng | Máy CNC nhỏ, robot mini, máy in | Dây chuyền tốc độ cao, robot công nghiệp |
| Giá thành | Thấp hơn nhiều | Cao hơn 2–3 lần |
Kết luận: Động cơ bước phù hợp cho các ứng dụng cần độ chính xác vừa phải và chi phí thấp, trong khi servo thích hợp cho hệ thống yêu cầu tốc độ và phản hồi động cao.
Cách lựa chọn và điều khiển động cơ bước hiệu quả
Để lựa chọn động cơ bước đúng kỹ thuật, cần chú ý:
- Xác định yêu cầu moment tải: Chọn moment giữ cao hơn tải khoảng 30%.
- Tốc độ quay mong muốn: Nếu cần quay nhanh, nên chọn loại có điện áp cao hơn.
- Loại driver phù hợp: Dùng driver microstep để tăng độ mịn và giảm rung.
- Nguồn cấp ổn định: Dòng cấp phải đủ định mức, tránh quá tải làm nóng cuộn dây.
- Kiểm tra kết nối dây pha: Sai thứ tự dây sẽ khiến động cơ quay ngược hoặc rung.
Ngoài ra, việc lập trình điều khiển xung và chiều quay bằng PLC hoặc vi điều khiển (Arduino, STM32…) cũng là yếu tố quyết định độ chính xác và tuổi thọ của hệ thống.
Một số câu hỏi thường gặp về động cơ bước
- Động cơ bước có cần encoder không?
Không bắt buộc. Phần lớn động cơ bước hoạt động theo nguyên lý “mở”, tuy nhiên có loại tích hợp encoder để tránh mất bước. - Động cơ bước có quay liên tục được không?
Có, nếu được cấp chuỗi xung liên tục. Tuy nhiên, cần kiểm soát tốc độ tăng dần để tránh mất bước. - Có thể dùng động cơ bước để kéo tải nặng không?
Có, nhưng cần chọn moment phù hợp, tránh để động cơ hoạt động gần ngưỡng cực đại.
Kết luận
Động cơ bước là giải pháp truyền động thông minh, linh hoạt, giúp điều khiển vị trí chính xác trong nhiều hệ thống tự động hóa. Việc hiểu rõ cấu tạo, nguyên lý và đặc tính kỹ thuật của loại motor này sẽ giúp kỹ sư thiết kế hệ thống hiệu quả, ổn định và tối ưu chi phí.
H&T Automation là đơn vị chuyên cung cấp các khóa học, giải pháp và thiết bị về mảng tự động hóa, từ thiết kế hệ thống điều khiển, lập trình PLC – HMI, đến tư vấn lựa chọn thiết bị công nghiệp.
Với đội ngũ kỹ sư giàu kinh nghiệm và định hướng chia sẻ kiến thức chuẩn kỹ thuật – thực tế, H&T Automation luôn đồng hành cùng khách hàng và học viên trên con đường phát triển tự động hóa thông minh, an toàn và hiệu quả.
Văn Trọng Hiển - Founder H&T Automation
Văn Trọng Hiển – người đứng sau định hướng chiến lược và chất lượng của các giải pháp tự động hóa do H&T Automation triển khai. Với nhiều năm kinh nghiệm thực chiến trong lĩnh vực PLC – SCADA – IoT, anh đã xây dựng H&T Automation trở thành đơn vị uy tín, chuyên cung cấp các giải pháp tự động hóa, các khóa học đào tạo để đồng hành cùng doanh nghiệp trong hành trình số hóa nhà máy.
Chi tiếtFounder
H&T Automation
Văn Trọng Hiển – người đứng sau định hướng chiến lược và chất lượng của các giải pháp tự động hóa do H&T Automation triển khai. Với nhiều năm kinh nghiệm thực chiến trong lĩnh vực PLC – SCADA – IoT, anh đã xây dựng H&T Automation trở thành đơn vị uy tín, chuyên cung cấp các giải pháp tự động hóa, các khóa học đào tạo để đồng hành cùng doanh nghiệp trong hành trình số hóa nhà máy.
Chi tiết