
Trong lĩnh vực điện tử, robot và tự động hóa, động cơ DC (Direct Current Motor) là một trong những thiết bị được sử dụng phổ biến nhờ khả năng điều chỉnh tốc độ, mô-men xoắn và hướng quay một cách linh hoạt. Đặc biệt, khi kết hợp với nền tảng vi điều khiển như Arduino, việc thiết kế mạch điều khiển động cơ DC trở nên đơn giản và hiệu quả hơn bao giờ hết.
Hiểu rõ nguyên lý hoạt động, cấu tạo, cũng như cách xây dựng mạch điều khiển động cơ DC là bước quan trọng để bạn triển khai các dự án từ cơ bản đến nâng cao, từ chế tạo xe robot cho đến các hệ thống tự động hóa phức tạp. Tài liệu này sẽ cung cấp cho bạn kiến thức toàn diện – từ khái niệm động cơ DC, ứng dụng thực tiễn, cho đến cách tính toán, lựa chọn động cơ và thiết kế mạch điều khiển phù hợp. Qua đó, giúp bạn tự tin biến các ý tưởng sáng tạo thành hiện thực một cách an toàn và chính xác.
Motor DC là gì?
Khi nhắc đến điều khiển tốc độ động cơ DC bằng Arduino, điều đầu tiên chúng ta cần hiểu chính là bản chất của motor DC. Vậy motor DC là gì?
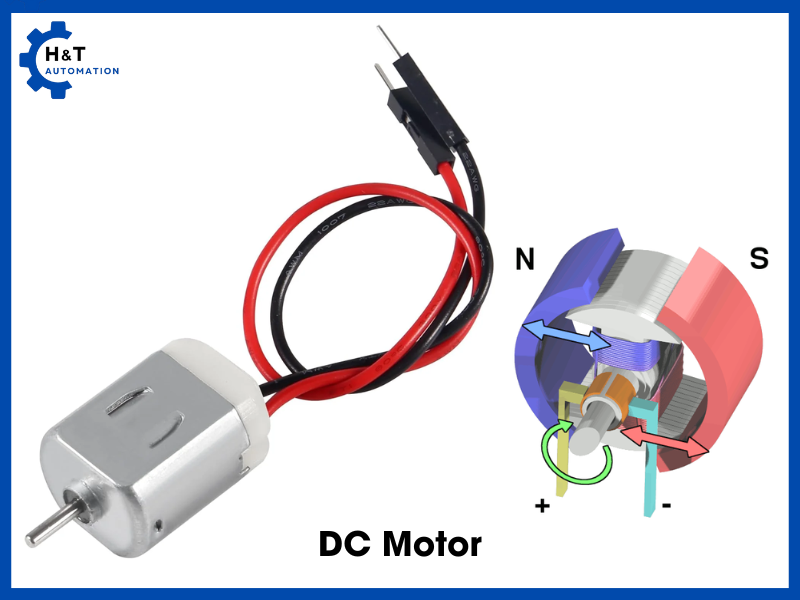
Motor DC, hay còn gọi là động cơ điện một chiều (DC là viết tắt của Direct Current Motors), là loại động cơ hoạt động nhờ dòng điện có hướng xác định. Nói đơn giản, motor DC chạy bằng nguồn điện một chiều (DC), khác với động cơ AC sử dụng điện xoay chiều.
Thông thường, động cơ DC có hai dây kết nối:
- Dây nguồn (ký hiệu VCC)
- Dây tiếp đất (ký hiệu GND)
Motor DC tạo ra chuyển động quay liên tục, biến điện năng thành cơ năng để phục vụ nhiều ứng dụng khác nhau.
Về mặt phân loại, động cơ DC được chia ra theo cách kích từ thành các loại:
- Kích từ độc lập
- Kích từ nối tiếp
- Kích từ song song
- Kích từ hỗn hợp
Ứng dụng của motor DC
Motor DC xuất hiện rộng rãi trong nhiều lĩnh vực nhờ khả năng điều khiển linh hoạt và hiệu suất cao. Một số ứng dụng phổ biến bao gồm:
- Robot và tự động hóa: Motor DC giúp điều khiển chính xác vị trí, tốc độ trong robot và hệ thống tự động. Nhờ đó, máy móc có thể di chuyển và thực hiện các tác vụ cụ thể.
- Thiết bị gia dụng: Có mặt trong máy lọc không khí, quạt, máy giặt, máy hút bụi… Motor DC giúp các thiết bị hoạt động mạnh mẽ và điều chỉnh tốc độ dễ dàng.
- Xe điện: Là thành phần quan trọng trong xe đạp điện, xe máy điện, ô tô điện, motor DC cung cấp lực kéo và cho phép điều chỉnh tốc độ cũng như mức tiêu thụ năng lượng.
- Hệ thống điều khiển tàu, máy bay: Motor DC đảm nhiệm việc điều chỉnh vị trí, hướng, tốc độ, đảm bảo độ chính xác và phản hồi nhanh trong các hệ thống điều khiển.
- Máy móc công nghiệp: Được dùng trong máy gia công kim loại, máy in, robot công nghiệp, băng chuyền tự động… nhờ khả năng tạo mô-men xoắn lớn và vận hành ổn định.
- Thiết bị y tế: Xuất hiện trong các máy quét MRI, máy xạ trị, máy hút dịch, thiết bị phẫu thuật… nơi yêu cầu độ chính xác cao và độ tin cậy trong vận hành.
- Thiết bị điện tử: Motor DC được sử dụng trong máy ảnh, máy quay phim, ổ đĩa CD/DVD, máy in… giúp tạo ra các chuyển động cho các bộ phận cơ khí bên trong thiết bị.
Ưu điểm của motor DC
Motor DC sở hữu nhiều ưu điểm nổi bật, khiến nó trở thành lựa chọn hàng đầu trong nhiều ứng dụng:
- Dễ điều khiển: Motor DC có thể điều chỉnh tốc độ và hướng quay một cách linh hoạt chỉ bằng cách thay đổi điện áp hoặc đảo chiều dòng điện.
- Phản hồi nhanh: Motor DC đáp ứng nhanh với sự thay đổi điện áp hoặc dòng điện, giúp dễ dàng kiểm soát tốc độ và vị trí.
- Mô-men xoắn khởi động cao: Motor DC tạo ra lực xoắn lớn ngay khi khởi động, phù hợp cho các ứng dụng cần lực kéo mạnh như máy nâng, thiết bị công nghiệp.
- Hiệu quả ở tải nhẹ: Motor DC duy trì tốc độ ổn định ngay cả với tải nhỏ, giúp vận hành êm ái và tiết kiệm năng lượng.
- Kích thước nhỏ gọn: Với thiết kế nhỏ, nhẹ, motor DC dễ tích hợp vào các thiết bị có không gian hạn chế.
- Chi phí hợp lý: So với motor AC, motor DC thường có chi phí sản xuất và vận hành thấp hơn, phù hợp với các ứng dụng cần tối ưu chi phí.
Cấu tạo của motor DC
Motor DC có cấu tạo khá đơn giản, gồm những bộ phận chính sau:
- Rotor (Củ động cơ):Là phần quay của motor DC, bao gồm một trục và các cuộn dây quấn xung quanh. Khi dòng điện chạy qua cuộn dây, lực từ được tạo ra giữa cuộn dây và từ trường nam châm xung quanh, làm cho rotor quay liên tục.
- Commutator (Bộ đổi chiều, còn gọi là đếm dây):Là bộ phận giúp đảo chiều dòng điện trong cuộn dây khi rotor quay. Commutator được làm từ các lá kim loại hoặc thanh than chì, nối trực tiếp với các cuộn dây. Nhờ commutator, motor DC có thể duy trì chuyển động quay theo một hướng ổn định hoặc dễ dàng đổi chiều.
- Chổi than (Brush):Là những thanh than hoặc graphite có nhiệm vụ tiếp xúc với commutator, truyền điện từ nguồn cung cấp vào cuộn dây của rotor. Chổi than giúp duy trì tiếp xúc điện ổn định trong quá trình rotor quay.
- Cuộn dây (Armature winding):Là tập hợp các dây dẫn quấn xung quanh lõi rotor. Khi có dòng điện chạy qua, cuộn dây tạo ra từ trường, tương tác với từ trường nam châm, sinh ra lực xoắn làm rotor quay.
- Nam châm cố định (Stator):Gồm các nam châm vĩnh cửu hoặc cuộn dây từ trường được gắn cố định xung quanh rotor. Từ trường của stator tương tác với cuộn dây rotor, tạo lực đẩy hoặc hút, khiến rotor quay.

Mạch điều khiển động cơ DC bằng Arduino
Trong phần này, chúng ta sẽ tìm hiểu cách điều khiển tốc độ và hướng quay của motor DC bằng Arduino, một kỹ năng vô cùng quan trọng trong các dự án tự động hóa và robotics. Có hai kỹ thuật cơ bản thường được dùng: PWM và mạch cầu H. Sau đây là cách ứng dụng cụ thể:
Điều khiển tốc độ motor DC bằng PWM
PWM (Pulse Width Modulation) là kỹ thuật điều chỉnh điện áp trung bình cung cấp cho motor DC bằng cách bật/tắt dòng điện với tần suất rất cao. Độ rộng xung (thời gian bật) càng lớn thì motor chạy càng nhanh, độ rộng xung nhỏ thì motor chạy chậm hơn.

1. IC LM555 (U1) dao động điều độ rộng xung. Điều chỉnh biến trở R1 (pot 100K) cho phép điều khiển độ rộng xung ra. Chú ý C1 = 0.01 uF => 0.1 uF thì tần số xung là 50KHz => 5KHz
2. Q4 sử dụng làm mạch Schmitt trigger, tạo dạng xung PWM chuẩn.
3. Q2 và Q3 phối hợp thành một mạch gate driver đúng điều kiện xung cho MOSFET hoạt động lớp D.
4. MOSFET chuyển mạch xung PWM, làm cho điện áp DC trên BDC motor thay đổi theo ý muốn => điều khiển tốc độ motor. C4 kết hợp với cuộn dây của BDC tạo thành mạch PWM demodulation, ổn định hoạt động của motor.
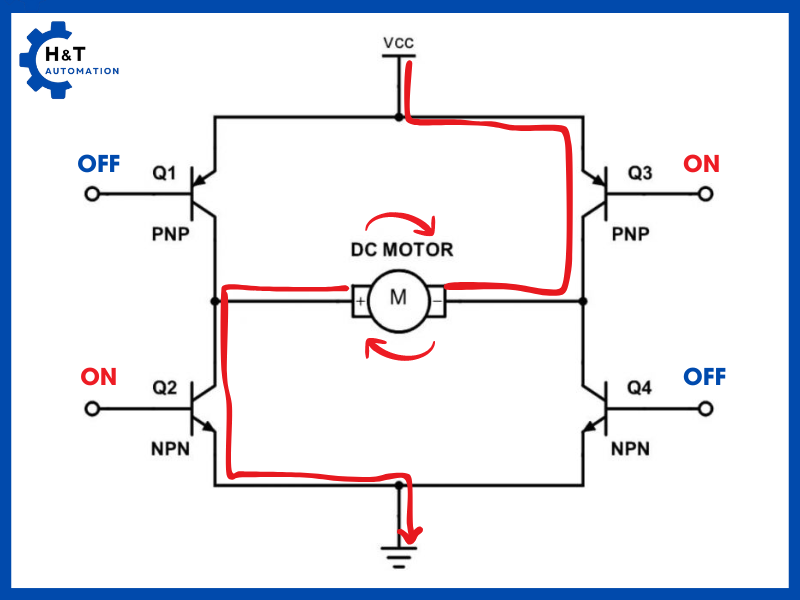
Điều khiển motor DC bằng mạch cầu H
Để đổi chiều quay của motor DC, ta cần đảo chiều dòng điện chạy qua motor. Mạch cầu H giúp thực hiện điều này. Cấu trúc mạch cầu H gồm:
- 4 công tắc điện tử (Transistor/Mosfet)
- Motor DC nằm giữa mạch, tạo thành hình chữ H.
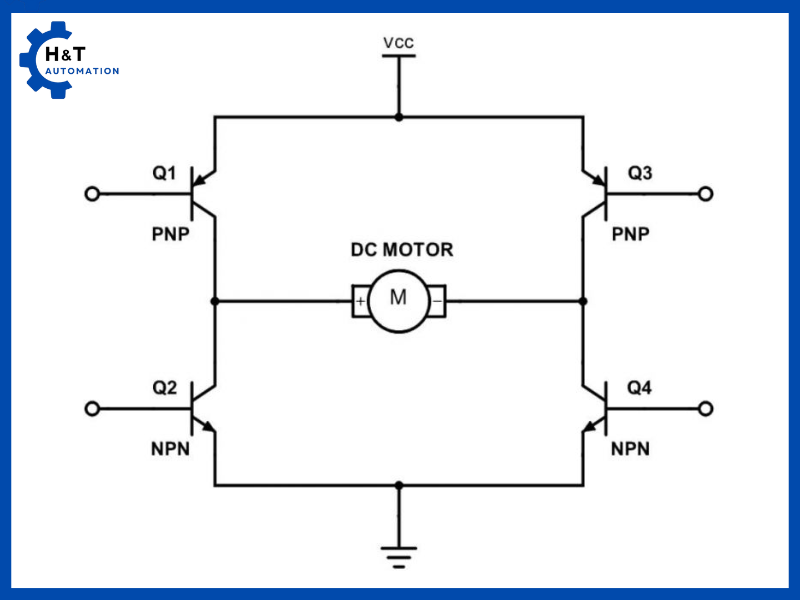
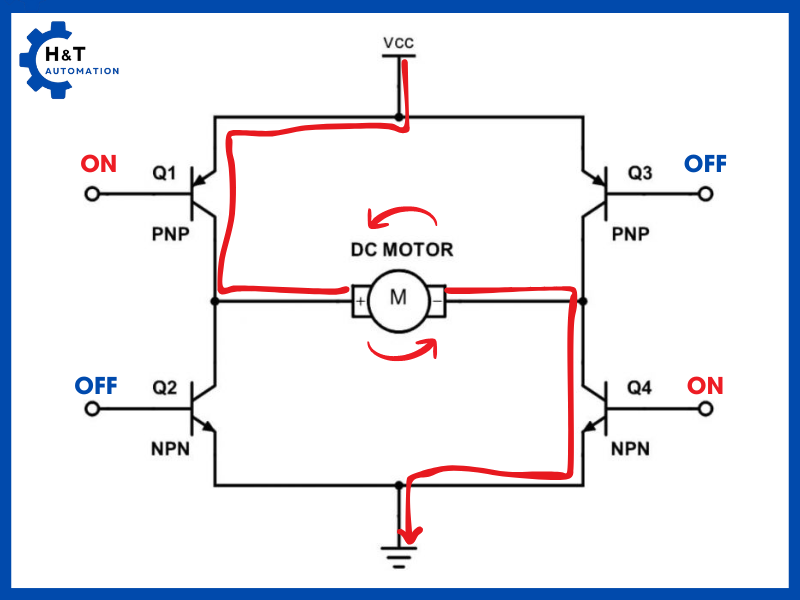
Nguyên lý:
- Bật 2 công tắc chéo → dòng điện đổi chiều → motor quay ngược.
- Kết hợp PWM với mạch cầu H giúp vừa điều khiển được tốc độ, vừa điều khiển được hướng quay của motor.
Bộ điều khiển tốc độ motor DC dùng chip L298N
L298N là IC cầu H kép, cho phép điều khiển đồng thời 2 motor DC về cả tốc độ lẫn hướng quay. Đặc điểm nổi bật:
- Điện áp điều khiển: +5 V ~ +12 V
- Dòng tối đa cho mỗi cầu H là: 2A (=>2A cho mỗi motor)
- Điện áp của tín hiệu điều khiển: +5 V ~ +7 V
- Dòng của tín hiệu điều khiển: 0 ~ 36mA (Arduino có thể chơi đến 40mA)
- Công suất hao phí: 20W (khi nhiệt độ T = 75 ℃)
- Nhiệt độ bảo quản: -25 ℃ ~ +130 ℃

Module L298N gồm các chân:
- 12V Power, 5V Power: Đây là 2 chân cấp nguồn trực tiếp đến động cơ.
- Bạn có thể cấp nguồn 9-12V ở 12V.
- Bên cạnh đó có jumper 5V, nếu bạn để như hình ở trên thì sẽ có nguồn 5V ra ở cổng 5V power, ngược lại thì không. Bạn để như hình thì ta chỉ cần cấp nguồn 12V vô ở 12V power là có 5V ở 5V power, từ đó cấp cho Arduino .
- Power GND chân này là GND của nguồn cấp cho Động cơ.
- Nếu chơi Arduino thì nhớ nối với GND của Arduino
- 2 Jump A enable và B enable, để như hình, đừng rút ra bạn nhé!
- Gồm có 4 chân Input. IN1, IN2, IN3, IN4. Chức năng các chân này tôi sẽ giải thích ở bước sau.
- Output A: nối với động cơ A. bạn chú ý chân +, -. Nếu bạn nối ngược thì động cơ sẽ chạy ngược. Và chú ý nếu bạn nối động cơ bước, bạn phải đấu nối các pha cho phù hợp.
Mạch điều khiển motor DC bằng Arduino và L298N
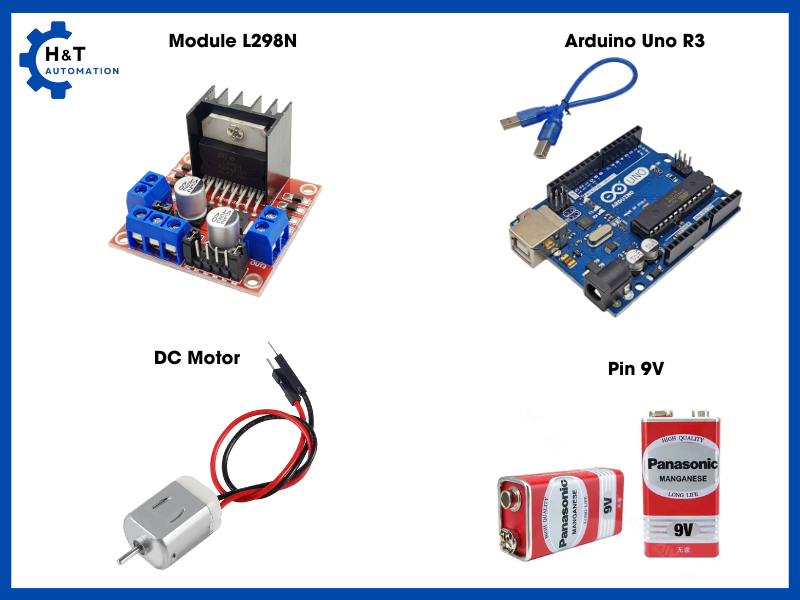
- Chuẩn bị phần cứng:
- Module L298N
- Board Arduino Uno
- Cáp đổ chương trình
- Motor DC
- Breadboard, dây nối
- Nguồn Pin (9-12V)
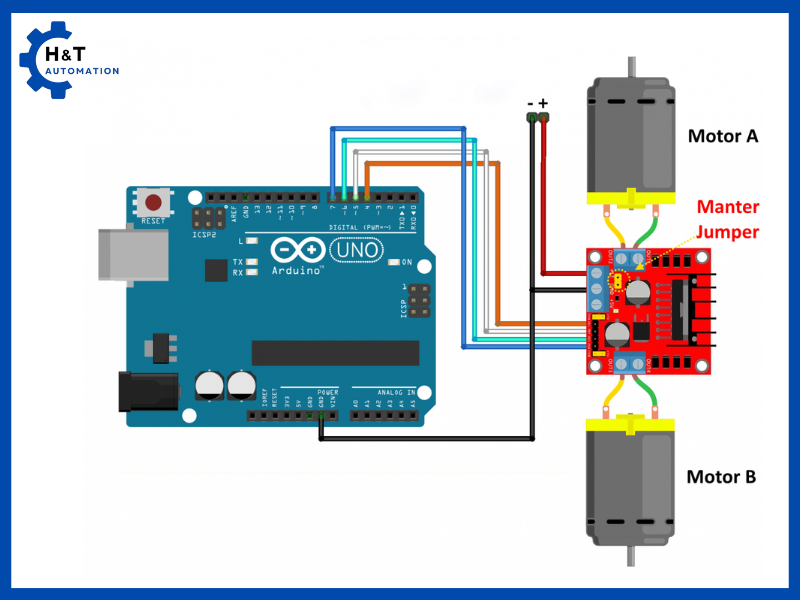
2. Nối mạch:
- Nếu bạn điều khiển 2 Động cơ, các bạn cần đấu nối Cực +, – của động cơ tương ứng với chân + , – của Terminal OUTPUT A, B trên Module L298N.
- Tiếp theo bạn cấp nguồn cho Module L298 như phần giải thích ở trên. Chú ý chọn Jump cho đúng.
- Nguồn cấp cho động cơ nếu dòng I < 1A thì có thể dùng nguồn của Arduino.Ngược lại thì dùng nguồn ngoài.
- Các chân số D7, D6, D5 và D4 của Arduino sẽ nối tương ứng với IN1, IN2, IN3 và IN4 của L298N.
- Chiều quay của động cơ được điều khiển bằng cách xuất các đầu ra HIGH hoặc LOW tại các chân INx.
- Ví dụ với Động Cơ A: Logic HIGH ở IN1 và IN2 Logic LOW sẽ làm động cơ quay 1 hướng nếu đặt Logic ngược lại sẽ làm động cơ quay theo hướng ngược lại.
- Bạn cần phải nhớ, đây là làm động cơ chỉ quay hết công suất mà thôi. Nếu muốn thay đổi tốc độ của nó, bạn cần phải băm xung PWM bằng các chân có hỗ trợ PWM trên Arduino (những chân có dấu ~).
- Để hiểu rõ hơn, bây giờ mình sẽ giúp các bạn tưởng tượng nhé:
- Tưởng tượng, chân IN1 là chân OutA.1, chân IN2 là chân OutA.2.
- Bạn cấp cực dương vào IN1, cực âm vào IN2 => motor quay một chiều (chiều 1).
- Bạn cấp cực âm vào IN1, cực dương vào IN2 => motor quay chiều còn lại (chiều 2)
- Cực dương ở đây là điện thế 5V, cực âm ở đây là điện thế 0V. Hiện điện thế được tính là điện thế ở IN1 trừ hiệu điện thế IN2.
- Giả sử, hiệu điện thế 5V sẽ là mạnh nhất trong việc điều khiển động cơ. Như vậy, chỉ cần hạ hiệu điện thế xuống là động cơ sẽ bị yếu đi.
- Và nếu hiệu điện thế < 0 => động cơ sẽ đảo chiều!
- Hãy vận dụng các luật này để hiểu những dòng code của mình phía dưới nhé!
3. Code điều khiển:
#define IN1 7
#define IN2 6
#define IN3 5
#define IN4 4
#define MAX_SPEED 255 //từ 0-255
#define MIN_SPEED 0
void setup()
{
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void motor_1_Dung() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
}
void motor_2_Dung() {
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
void motor_1_Tien(int speed) { //speed: từ 0 - MAX_SPEED
speed = constrain(speed, MIN_SPEED, MAX_SPEED);//đảm báo giá trị nằm trong một khoảng từ 0 - MAX_SPEED
digitalWrite(IN1, HIGH);// chân này không có PWM
analogWrite(IN2, 255 - speed);
}
void motor_1_Lui(int speed) {
speed = constrain(speed, MIN_SPEED, MAX_SPEED);//đảm báo giá trị nằm trong một khoảng từ 0 - MAX_SPEED
digitalWrite(IN1, LOW);// chân này không có PWM
analogWrite(IN2, speed);
}
void motor_2_Tien(int speed) { //speed: từ 0 - MAX_SPEED
speed = constrain(speed, MIN_SPEED, MAX_SPEED);//đảm báo giá trị nằm trong một khoảng từ 0 - MAX_SPEED
analogWrite(IN3, speed);
digitalWrite(IN4, LOW);// chân này không có PWM
}
void motor_2_Lui(int speed) {
speed = constrain(speed, MIN_SPEED, MAX_SPEED);//đảm báo giá trị nằm trong một khoảng từ 0 - MAX_SPEED
analogWrite(IN4, 255 - speed);
digitalWrite(IN3, HIGH);// chân này không có PWM
}
void loop()
{
motor_1_Tien(MAX_SPEED); // motor 1 tiến
delay(5000);//tiến 5 s
motor_2_Lui(MAX_SPEED); //motor 2 lùi
// motor 1 vẫn tiến
delay(2000);//tiến 2 s
motor_1_Dung();
motor_2_Dung();
delay(10000);//dừng 10s
}
Chọn động cơ DC phù hợp cho dự án
Tầm quan trọng của việc chọn đúng động cơ DC
Trong bất kỳ dự án cơ khí hay tự động hóa nào, việc lựa chọn đúng loại động cơ DC có ý nghĩa rất quan trọng, vì nó ảnh hưởng trực tiếp đến hiệu suất, độ tin cậy và tuổi thọ của toàn bộ hệ thống. Động cơ DC thường được ví như “trái tim” của các thiết bị công nghiệp, từ máy móc sản xuất, băng tải, đến robot tự động. Nếu chọn không đúng loại động cơ, bạn có thể gặp phải những vấn đề nghiêm trọng như hiệu suất kém, tiêu tốn nhiều điện năng, hoặc thậm chí làm hư hỏng thiết bị.
Để đảm bảo dự án vận hành trơn tru và đạt hiệu quả cao, bạn cần cân nhắc kỹ các yếu tố như mô-men xoắn, tốc độ quay và điện áp làm việc. Mỗi ứng dụng cụ thể lại có những yêu cầu riêng, vì vậy việc chọn đúng động cơ sẽ giúp tối ưu hiệu suất, tiết kiệm chi phí và giảm thiểu rủi ro hư hỏng.
Mô-men xoắn và vai trò của nó
Mô-men xoắn là lực mà động cơ tạo ra để làm quay trục, thường được đo bằng đơn vị Nm (Newton-mét). Nói đơn giản, nó thể hiện khả năng động cơ đẩy hoặc kéo một tải trọng với một lực nhất định. Động cơ có mô-men xoắn cao có thể làm việc với tải nặng hoặc vượt qua các lực cản lớn.
Ví dụ, trong những thiết bị như máy khoan, máy cắt hay robot công nghiệp, mô-men xoắn cao rất quan trọng. Chẳng hạn, một máy khoan cần đủ mô-men xoắn để xoay mũi khoan xuyên qua vật liệu cứng như kim loại hoặc bê tông. Ngược lại, các ứng dụng như quạt hoặc máy in chỉ yêu cầu mô-men xoắn thấp để hoạt động mượt mà mà không cần lực lớn.
Tốc độ quay và ứng dụng
Tốc độ quay của động cơ là số vòng quay của trục trong một phút (RPM). Tốc độ càng cao thì động cơ quay càng nhanh, nhưng thường đi kèm với mô-men xoắn thấp hơn.
Trong các ứng dụng cần tốc độ cao như máy khoan tốc độ cao, máy cắt, hoặc hệ thống truyền động băng tải, tốc độ quay lớn là yếu tố quan trọng. Ví dụ, một máy khoan tốc độ cao cần động cơ có RPM lớn để mũi khoan xoay nhanh, giúp khoan nhanh và chính xác hơn.
Điện áp làm việc và khả năng tương thích nguồn điện
Điện áp làm việc là mức điện áp mà động cơ được thiết kế để vận hành tối ưu. Điện áp này cần phải phù hợp với nguồn điện mà bạn sẽ sử dụng trong dự án.
Nếu điện áp của động cơ không phù hợp với nguồn điện, động cơ có thể hoạt động không ổn định, nhanh hỏng, hoặc thậm chí bị cháy. Ví dụ, nếu bạn cấp điện 24V cho động cơ DC chỉ thiết kế hoạt động ở 12V, động cơ sẽ bị quá tải, sinh nhiệt và dễ cháy hỏng.
Để đảm bảo an toàn và vận hành ổn định, hãy lựa chọn động cơ DC có điện áp làm việc phù hợp với nguồn điện bạn dự định sử dụng. Nếu dùng pin hoặc nguồn điện điều chỉnh được, cần chọn động cơ tương thích với dải điện áp mà nguồn có thể cung cấp.
Tóm lại, chọn đúng động cơ DC là bước quan trọng trong bất kỳ dự án cơ khí hay tự động hóa nào. Việc xem xét đầy đủ các yếu tố như mô-men xoắn, tốc độ quay và điện áp làm việc sẽ giúp bạn đảm bảo động cơ phù hợp với yêu cầu, tối ưu hiệu suất, và tránh những rủi ro hư hỏng hoặc lãng phí chi phí không cần thiết.
Tính toán và lựa chọn nguồn cung cấp điện phù hợp
Tầm quan trọng của việc chọn đúng nguồn điện
Sau khi xác định được loại động cơ DC phù hợp, bước tiếp theo là lựa chọn nguồn cung cấp điện có công suất và thông số phù hợp để vận hành động cơ. Nếu chọn sai nguồn, động cơ có thể hoạt động yếu, không ổn định, hoặc thậm chí bị hư hỏng do quá tải hoặc điện áp không phù hợp.
Nguồn cung cấp điện có vai trò then chốt trong việc đảm bảo động cơ vận hành ổn định, bền bỉ và đạt hiệu suất tối ưu. Nếu nguồn điện không đủ công suất, động cơ không thể hoạt động hết khả năng, hoặc dễ bị sụt áp và nóng quá mức dẫn tới hư hỏng.
Cách tính công suất tiêu thụ của động cơ
Để chọn được nguồn điện phù hợp, trước tiên bạn cần tính công suất tiêu thụ của động cơ DC. Công suất tiêu thụ phụ thuộc vào các yếu tố chính sau:
- Điện áp làm việc (V): Thông số điện áp định mức mà động cơ sử dụng.
- Dòng điện định mức (A): Lượng dòng điện tối đa mà động cơ tiêu thụ khi hoạt động ở tải đầy đủ.
- Hiệu suất (%): Tỷ lệ phần trăm năng lượng điện được chuyển thành công suất cơ.
Công thức tính công suất tiêu thụ:
Công suất (W) = (Điện áp (V) × Dòng điện (A)) / Hiệu suất
Ví dụ: Một động cơ DC hoạt động ở 12V, dòng điện định mức 2A và hiệu suất 80%. Công suất tiêu thụ sẽ tính như sau:
Công suất = (12V × 2A) / 0,8 = 30W
Chọn nguồn cung cấp điện phù hợp
Sau khi tính được công suất, bạn cần lựa chọn nguồn điện có thông số phù hợp. Một số lưu ý quan trọng:
- Công suất đầu ra: Nguồn điện phải có công suất lớn hơn hoặc ít nhất bằng công suất tiêu thụ của động cơ. Thông thường, nên chọn nguồn có công suất dư ra từ 20–30% để đảm bảo an toàn và dự phòng khi tải tăng bất thường.
- Điện áp đầu ra: Phải đúng với điện áp làm việc của động cơ. Ví dụ, động cơ 12V thì nguồn phải cung cấp đúng 12V, không thấp hơn hoặc cao hơn.
- Dòng điện đầu ra: Phải lớn hơn hoặc bằng dòng điện định mức của động cơ. Nếu dòng điện nguồn không đủ, động cơ sẽ yếu hoặc không chạy được.
- Bảo vệ quá dòng và cầu chì: Nguồn điện nên có tính năng bảo vệ quá dòng và tích hợp cầu chì, giúp phòng tránh hư hỏng khi xảy ra sự cố như chập điện hoặc ngắn mạch.
Sau khi chọn được nguồn điện phù hợp, hãy đảm bảo đấu nối đúng kỹ thuật và tuân thủ hướng dẫn an toàn của nhà sản xuất để tránh rủi ro điện giật hoặc hư hỏng thiết bị.
An toàn khi làm việc với động cơ DC và Arduino
Tầm quan trọng của an toàn trong các dự án điện tử và robot
Khi thực hiện các dự án điện tử hoặc robot, an toàn luôn phải được đặt lên hàng đầu. Các thiết bị điện tử và động cơ có thể gây nguy hiểm nếu không được xử lý đúng cách. Rủi ro có thể bao gồm điện giật, cháy nổ hoặc thương tích cơ học.
Việc tuân thủ các nguyên tắc an toàn cơ bản không chỉ giúp bảo vệ bạn mà còn đảm bảo dự án vận hành ổn định, bền bỉ. Khi thực hiện đầy đủ các biện pháp phòng ngừa, bạn có thể tránh được những sự cố đáng tiếc và tập trung phát triển dự án một cách hiệu quả.
Quy tắc an toàn cơ bản khi làm việc với động cơ DC và Arduino
- Ngắt nguồn trước khi thao tác: Luôn tắt nguồn điện trước khi thực hiện bất kỳ thay đổi hay sửa chữa nào trên mạch hoặc thiết bị. Điều này giúp tránh nguy cơ điện giật và hư hỏng linh kiện.
- Sử dụng thiết bị bảo hộ: Khi làm việc với động cơ hoặc các bộ phận cơ khí có thể gây thương tích, hãy đeo găng tay và kính bảo hộ để bảo vệ bản thân.
- Bảo quản linh kiện nơi khô ráo, sạch sẽ: Độ ẩm hoặc bụi bẩn có thể làm hỏng động cơ và linh kiện điện tử. Luôn lưu trữ các thiết bị ở nơi khô ráo và sạch sẽ để đảm bảo tuổi thọ và độ an toàn.
- Hiểu rõ nguyên lý hoạt động: Trước khi kết nối hoặc sử dụng các linh kiện, hãy chắc chắn bạn hiểu rõ cách chúng hoạt động và cách kết nối chúng an toàn. Điều này giúp tránh hư hỏng thiết bị hoặc sự cố ngoài ý muốn.
- Tuân thủ hướng dẫn của nhà sản xuất: Luôn đọc kỹ và làm theo hướng dẫn sử dụng và an toàn từ nhà sản xuất đối với động cơ, Arduino và các linh kiện liên quan.
An toàn là yếu tố không thể xem nhẹ khi làm việc với động cơ DC và Arduino. Bằng cách tuân thủ các quy tắc trên, bạn có thể giảm thiểu rủi ro, bảo vệ bản thân và đảm bảo dự án của mình vận hành ổn định, hiệu quả.
Văn Trọng Hiển - Founder H&T Automation
Văn Trọng Hiển – người đứng sau định hướng chiến lược và chất lượng của các giải pháp tự động hóa do H&T Automation triển khai. Với nhiều năm kinh nghiệm thực chiến trong lĩnh vực PLC – SCADA – IoT, anh đã xây dựng H&T Automation trở thành đơn vị uy tín, chuyên cung cấp các giải pháp tự động hóa, các khóa học đào tạo để đồng hành cùng doanh nghiệp trong hành trình số hóa nhà máy.
Chi tiếtFounder
H&T Automation
Văn Trọng Hiển – người đứng sau định hướng chiến lược và chất lượng của các giải pháp tự động hóa do H&T Automation triển khai. Với nhiều năm kinh nghiệm thực chiến trong lĩnh vực PLC – SCADA – IoT, anh đã xây dựng H&T Automation trở thành đơn vị uy tín, chuyên cung cấp các giải pháp tự động hóa, các khóa học đào tạo để đồng hành cùng doanh nghiệp trong hành trình số hóa nhà máy.
Chi tiết